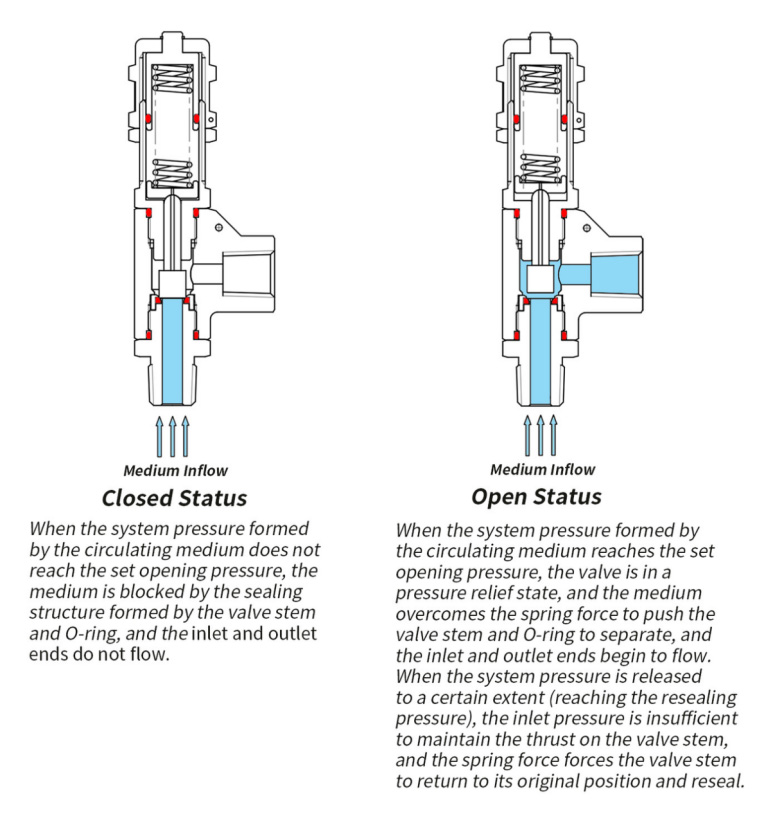
ໃນຖານະເປັນອົງປະກອບປ້ອງກັນຄວາມກົດດັນເກີນ, ຫຼັກການຂອງວາວບັນເທົາສ່ວນແມ່ນວ່າເມື່ອຄວາມດັນຂອງລະບົບເກີນຄ່າຄວາມດັນທີ່ຕັ້ງໄວ້, ກ້ານວາວຈະຍົກຂຶ້ນເພື່ອປ່ອຍຄວາມດັນຂອງລະບົບ, ດັ່ງນັ້ນຈຶ່ງປົກປ້ອງລະບົບ ແລະ ອົງປະກອບອື່ນໆຈາກຄວາມເສຍຫາຍ.
ເນື່ອງຈາກຄວາມຕ້ອງການທີ່ຈະຮັກສາການປະທັບຕາພາຍໃຕ້ຄວາມກົດດັນປົກກະຕິ, ວາວລະບາຍຄວາມດັນແບບສັດສ່ວນຮຽກຮ້ອງໃຫ້ມີການປະທັບຕາທຳອິດ. ເມື່ອຄວາມດັນເກີນຖືກປ່ອຍອອກ, ວາວລະບາຍຄວາມດັນແບບສັດສ່ວນຈຳເປັນຕ້ອງປະທັບຕາຄວາມດັນໃນຊ່ອງທາງປ່ອຍ, ເຊິ່ງຕ້ອງການການປະທັບຕາທີສອງ. ການປະທັບຕາທັງສອງແມ່ນບັນລຸໄດ້ຜ່ານອົງປະກອບການປະທັບຕາທີ່ເຮັດໜ້າທີ່ຢູ່ເທິງກ້ານວາວ, ເຊິ່ງໃນທາງກັບກັນເຮັດໜ້າທີ່ໂດຍກົງກັບອົງປະກອບຄວາມຍືດຫຍຸ່ນ. ຄວາມຕ້ານທານການປະທັບຕາຈະສົ່ງຜົນກະທົບຕໍ່ກ້ານວາວຢ່າງຫຼີກລ່ຽງບໍ່ໄດ້, ເຊິ່ງເຮັດໃຫ້ຄ່າການປ່ອຍຄວາມດັນບໍ່ໝັ້ນຄົງ.
ການອອກແບບການຄວບຄຸມທີ່ຊັດເຈນຂອງ RV4
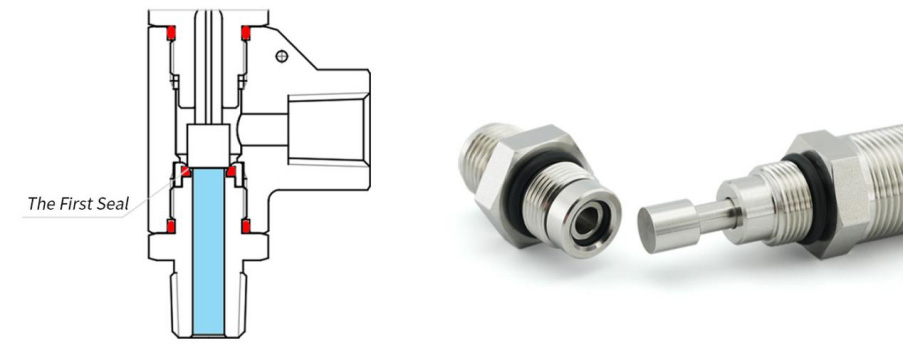
ປະທັບຕາທຳອິດ
ປະທັບຕາທຳອິດຖືກອອກແບບໃຫ້ເປັນປະທັບຕາສຳຜັດຄວາມດັນຮາບພຽງ, ເຊິ່ງຫຼີກລ່ຽງອິດທິພົນຂອງຄວາມຕ້ານທານການປະທັບຕາຕໍ່ກ້ານວາວ. ໃນເວລາດຽວກັນ, ໜ້າຜິວແຮງຂອງກ້ານວາວຈະຖືກຂະຫຍາຍສູງສຸດ, ດັ່ງນັ້ນການປ່ຽນແປງຄວາມດັນເລັກນ້ອຍສາມາດຂະຫຍາຍໄດ້, ເພີ່ມການຕອບສະໜອງໃນທາງບວກ ແລະ ປັບປຸງຄວາມອ່ອນໄຫວຂອງວາວ.
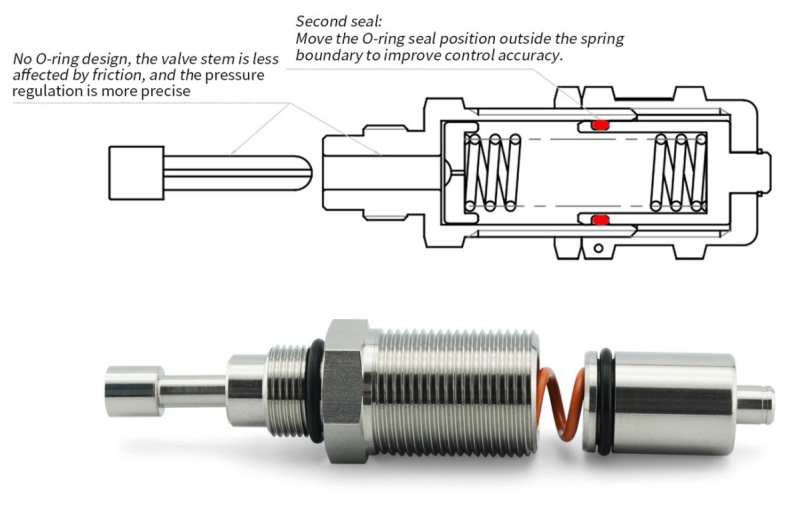
ປະທັບຕາອັນທີສອງ
ປະທັບຕາທີສອງ,ວາວບັນເທົາສັດສ່ວນ RV4, ຍ້າຍມັນອອກນອກຂອບເຂດຂອງສະປິງໂດຍກົງ, ລວມທັງສະປິງ, ດັ່ງນັ້ນສະປິງຈະກະທຳໂດຍກົງກັບກ້ານວາວໂດຍບໍ່ມີການເສື່ອມສະພາບຂອງຜະນຶກ, ປັບປຸງຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມຂອງວາວຢ່າງຫຼວງຫຼາຍ.
ຊ່ວງຄວບຄຸມຄວາມກົດດັນແບ່ງຍ່ອຍ
ຜ່ານການເພີ່ມປະສິດທິພາບຂອງສອງປະທັບຕາ, ຄວາມຖືກຕ້ອງຂອງວາວບັນເທົາອັດຕາສ່ວນ RV4 ແມ່ນຂຶ້ນກັບຄວາມຖືກຕ້ອງຂອງສະປິງໂດຍກົງ. ເພື່ອປັບປຸງຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມຂອງວາວຕໍ່ຄວາມດັນໃຫ້ດີຂຶ້ນ, ຜູ້ອອກແບບ Hikelok ໄດ້ແບ່ງລະດັບການຄວບຄຸມຄວາມດັນອອກເປັນສອງຊ່ວງຫຼັກ ແລະ ອອກແບບສະປິງທີ່ສົມເຫດສົມຜົນທີ່ສຸດສຳລັບແຕ່ລະຊ່ວງ, ເພື່ອໃຫ້ຊ່ວງການເຮັດວຽກຂອງສະປິງແຕ່ລະອັນຖືກຄວບຄຸມໃນຊ່ວງທີ່ໝັ້ນຄົງທີ່ສຸດ, ເຊິ່ງເຮັດໃຫ້ສາມາດຄວບຄຸມຄວາມດັນໄດ້ຢ່າງແມ່ນຍຳຍິ່ງຂຶ້ນ.

ສຳລັບລາຍລະອຽດການສັ່ງຊື້ເພີ່ມເຕີມ, ກະລຸນາອ້າງອີງໃສ່ການເລືອກລາຍການສິນຄ້າໃນເວັບໄຊທ໌ທາງການຂອງ Hikelokຖ້າທ່ານມີຄຳຖາມໃດໆກ່ຽວກັບການເລືອກ, ກະລຸນາຕິດຕໍ່ພະນັກງານຂາຍມືອາຊີບທາງອອນລາຍ 24 ຊົ່ວໂມງຂອງ Hikelok.
ເວລາໂພສ: ວັນທີ 11 ພະຈິກ 2025